Global BPS (Truncated Gaussian)
(the code for this example can be found here, note that the doc rendered here was automatically generated, if you want to fix it, please do it in the julia code directly)
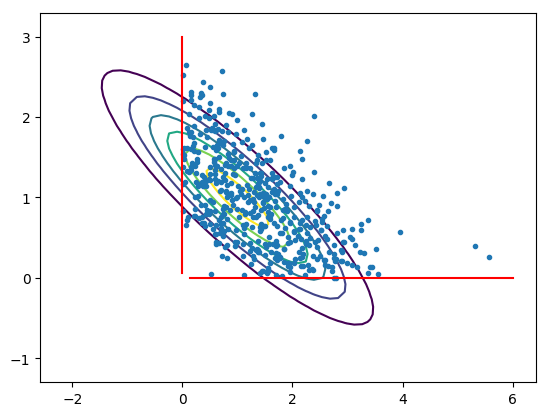
In this example we use the global Bouncy Particle Sampler on 2D Gaussian truncated to the positive orthan to show how to declare a BPS model.
Start by loading the library:
using PDSampler
you then need to define two elements:
a geometry (boundaries)
an energy (gradient of the log-likelihood of the target)
The positive orthan corresponds to a simple Polygonal domain where the boundaries are the axes. The normal to these boundaries (ns) are therefore unit vectors and the intercepts (a) are zero. A polygonal domain is then declared with the constructor Polygonal.
p = 2
# normal to faces and intercepts
ns, a = eye(p), zeros(p)
geom = Polygonal(ns, a)
The function nextboundary returns a function that can compute the next boundary on the current ray [x,x+tv] with t>0 as well as the time of the hit.
nextbd(x, v) = nextboundary(geom, x, v)
The model then needs to be specified: you need to define a function of the form gradll(x) which can return the gradient of the log-likelihood at some point x. Here, let us consider a 2D gaussian.
# here we build a valid precision matrix. The cholesky decomposition of
# the covariance matrix will be useful later to build a sensible
# starting point for the algorithm.
srand(12)
P1 = randn(p,p)
P1 *= P1'
P1 += norm(P1)/100*eye(p)
C1 = inv(P1); C1 += C1'; C1/=2;
L1 = cholfact(C1)
mu = zeros(p)+1.
mvg = MvGaussianCanon(mu, P1)
Here, we have defined the gaussian through the Canonical representation i.e.: by specifying a mean and a precision matrix.
Every model must implement a gradloglik function returning the gradient of the log-likelihood at a point x.
gradll(x) = gradloglik(mvg, x)
Next, you need to define the function which can return the first arrival time of the corresponding Inhomogenous Poisson Process.
Note that you could be using nextevent_zz here as well if you wanted to use the Zig-Zag sampler (and you could implement other kernels as well).
nextev(x, v) = nextevent_bps(mvg, x, v)
For a Gaussian (and some other simple distributions), this is analytical through an inversion-like method.
Finally, you need to specify the parameters of the simulation such as the starting point and velocity, the length of the path generated, the rate of refreshment and the maximum number of gradient evaluations.
T = 1000.0 # length of path generated
lref = 2.0 # rate of refreshment
x0 = mu+L1[:L]*randn(p) # sensible starting point
v0 = randn(p) # starting velocity
v0 /= norm(v0) # put it on the sphere (not necessary)
# Define a simulation
sim = Simulation( x0, v0, T, nextev, gradll,
nextbd, lref ; maxgradeval = 10000)
And finally, generate the path and recover some details about the simulation.
(path, details) = simulate(sim)
The path object belongs to the type Path and can be sampled using samplepath.
A crude sanity check is for example to check that the estimated mean obtained through quadrature along the path yields a similar result as a basic Monte Carlo estimator.
# Building a basic MC estimator
# (taking samples from 2D MVG that are in positive orthan)
sN = 1000
s = broadcast(+, mu, L1[:L]*randn(p,sN))
mt = zeros(2)
np = 0
# Sum for all samples in the positive orthan
ss = [s; ones(sN)']
mt = sum(ss[:,i] for i in 1:sN if !any(e->e<0, ss[1:p,i]))
mt = mt[1:p]/mt[end]
You can now compare the norm of mt (a crude MC estimator) to pathmean(path) (computing the integrals along the segments of the path) and you will see that the relative error is below 5%.