
Training#
The ConvNP model can be trained using the Trainer class, which implements stochastic gradient descent using the Adam optimiser.
We will demonstrate training a ConvNP model with the following set-up:
Goal: spatially interpolate daily-average ERA5 2m temperature over North America.
Context data: ERA5 reanalysis data, 100km EarthEnv elevation data, and GLDAS land mask data.
Training period: 2010-2018.
Validation period: 2019.
set_gpu_default_device()
Initialise TaskLoader and ConvNP model#
task_loader = TaskLoader(
context=[era5_ds, land_mask_ds, lowres_aux_ds],
target=era5_ds,
)
task_loader.load_dask()
print(task_loader)
TaskLoader(3 context sets, 1 target sets)
Context variable IDs: (('2m_temperature',), ('GLDAS_mask',), ('elevation', 'cos_D', 'sin_D'))
Target variable IDs: (('2m_temperature',),)
# Set up model
model = ConvNP(data_processor, task_loader, unet_channels=(32, 32, 32, 32, 32))
dim_yc inferred from TaskLoader: (1, 1, 3)
dim_yt inferred from TaskLoader: 1
dim_aux_t inferred from TaskLoader: 0
internal_density inferred from TaskLoader: 400
encoder_scales inferred from TaskLoader: [0.0012499999720603228, 0.0012499999720603228, 0.00416666641831398]
decoder_scale inferred from TaskLoader: 0.0025
Define how Tasks are generated#
We will generate Tasks for a set of dates by randomly sampling between 0 and 500 ERA5 grid cells as context points,
and passing all ERA5 grid cells as target points.
All auxiliary data will be passed as context points.
def gen_tasks(dates, progress=True):
tasks = []
for date in tqdm_notebook(dates, disable=not progress):
N_c = np.random.randint(0, 500)
task = task_loader(date, context_sampling=[N_c, "all", "all"], target_sampling="all")
tasks.append(task)
return tasks
Generate validation tasks for testing generalisation#
val_dates = pd.date_range(val_range[0], val_range[1])[::date_subsample_factor]
val_tasks = gen_tasks(val_dates)
Print number of model parameters#
Once the model has been compiled by running it with a Task, the number of ConvNP model parameters can be printed as below.
This is useful for checking that the model is not too large for the available GPU memory.
_ = model(val_tasks[0])
print(f"Model has {deepsensor.backend.nps.num_params(model.model):,} parameters")
Model has 339,590 parameters
Training with the Trainer class#
The Trainer class is initialised with a ConvNP model, and an optional learning rate.
Calling a Trainer object with a list of Tasks will perform a single epoch of training, and return a list of losses for each task.
The Trainer class also implements a train method, which will train the model for a specified number of epochs, and return a list of losses for each epoch.
We will train the model for 50 epochs, and save the model with the best validation RMSE.
def compute_val_rmse(model, val_tasks):
errors = []
target_var_ID = task_loader.target_var_IDs[0][0] # assume 1st target set and 1D
for task in val_tasks:
mean = data_processor.map_array(model.mean(task), target_var_ID, unnorm=True)
true = data_processor.map_array(task["Y_t"][0], target_var_ID, unnorm=True)
errors.extend(np.abs(mean - true))
return np.sqrt(np.mean(np.concatenate(errors) ** 2))
losses = []
val_rmses = []
# Train model
val_rmse_best = np.inf
trainer = Trainer(model, lr=5e-5)
for epoch in tqdm_notebook(range(50)):
train_tasks = gen_tasks(pd.date_range(train_range[0], train_range[1])[::date_subsample_factor], progress=False)
batch_losses = trainer(train_tasks)
losses.append(np.mean(batch_losses))
val_rmses.append(compute_val_rmse(model, val_tasks))
if val_rmses[-1] < val_rmse_best:
val_rmse_best = val_rmses[-1]
model.save(deepsensor_folder)
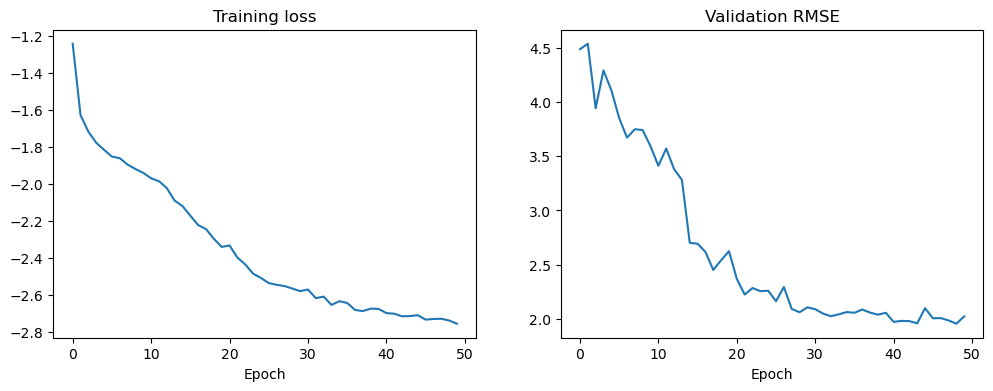
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].plot(losses)
axes[1].plot(val_rmses)
_ = axes[0].set_xlabel("Epoch")
_ = axes[1].set_xlabel("Epoch")
_ = axes[0].set_title("Training loss")
_ = axes[1].set_title("Validation RMSE")
Visualise trained model predictions#
We will use the high-level model.predict method to verify that the trained model is predicting sensible values.
See the Prediction page for more details on model.predict.
date = "2019-06-25"
test_task = task_loader(date, [200, "all", "all"], seed_override=42)
pred = model.predict(test_task, X_t=era5_raw_ds, resolution_factor=2)
fig = deepsensor.plot.prediction(pred, date, data_processor, task_loader, test_task, crs=ccrs.PlateCarree())
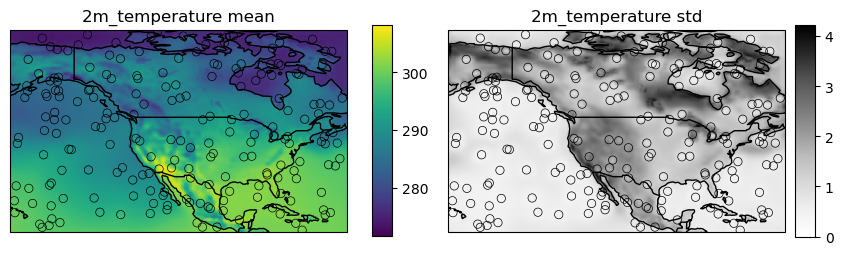
Looks good!